


Die Frist für diese Aufgabe ist festgelegt auf: 22.03.2025 20:00:00
1. Auftrag: Kameramann
Auch in der Slowakei gibt es einige Unternehmen, die Filme oder zumindest verschiedene Videoclips produzieren. Beim Filmen einer bestimmten Szene muss der Kameramann oft aus verschiedenen Winkeln und an verschiedenen Orten über der Szene positioniert sein. In dieser Aufgabe verwenden wir den Gyrosensor, der die aktuelle Neigung und Drehung der Steuernabe ablesen kann. Die Bewegung des Kameramanns wird durch Neigen der Nabe gesteuert.
Aufgabe für Kaninchen: Baue und programmiere einen Mechanismus, der es dem Kameramann ermöglicht, sich an eine beliebige 3D-Position im Raum zu bewegen, von der aus er die Filmszene filmen kann. Der Kameramann kann durch eine einfache LEGO-Figur dargestellt werden. Wichtig ist, dass der Kameramann jeden beliebigen Ort im 3D-Raum erreichen kann – nur durch Neigen/Drehen der Steuerzentrale, die der Filmregisseur in der Hand hält.
Aufgabe für Tiger: Ähnlich wie die Hasenaufgabe, aber wenn ein bestimmter Ort im 3D-Raum erreicht ist, können wir ihn mit einem Hub-Button als Startort speichern, dann den Kameramann zu einer Zielposition bewegen und das ebenfalls mit einem Button bestätigen. Abschließend kann der Benutzer mit den Hub-Buttons ein Bewegungszeitintervall festlegen – die Dauer der Bewegung von der Start- zur Zielposition. Nachdem die Zeit bestätigt wurde, wird der Kameramann zurück zur Startposition bewegt und nachdem die Szene gestartet wurde, bewegt die Maschine den Kameramann erneut per Knopfdruck (die Filmklappe klatscht) so flüssig, reibungslos und linear wie möglich zur Zielposition.
Aufgabe für Simulanten: Die Aufgabe ist die gleiche wie für Tiger, aber statt im 3D-Raum bedienen wir den Roboter im 2D-Raum und die dritte Dimension wird durch die Rotation dargestellt (d. h. der Roboter hat eine konfigurierbare Start- und Endrotation, muss während der Bewegung jedoch auf den Zielort ausgerichtet sein. Anstatt den Roboter mit dem Gyroskop zu steuern, nutzen wir die Tasten der Steuereinheit, um den Kameraroboter zu steuern.
Obrázok: kameraman, zdroj: LEGO.com
2. Auftrag: Verstecken und suchen
Der Stadtbezirk hat beschlossen, einen neuen modernen Kindergarten zu bauen, der unter anderem eine ungewöhnliche Form haben wird. Die Kindergärtnerin weiß jedoch, dass Kinder gerne Verstecken spielen, und deshalb sollte es im Raum mindestens zwei Orte geben, die nicht voneinander einsehbar sind. Der Plan des Spielzimmers für den Kindergarten ist durch eine dicke schwarze Linie auf dem Boden dargestellt.
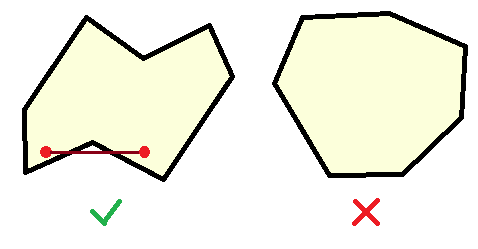
Aufgabe für Kaninchen: Der Roboter steht vor einem Raumplan. Er soll ermitteln, ob es im Raum mindestens zwei Punkte gibt, die man von einem zum anderen nicht sehen kann – das heißt, wenn wir sie mit einer Geraden verbinden, dann verläuft diese Linie durch eine Wand.
Aufgabe für Tiger: Die gleiche wie die Aufgabe für Kaninchen, allerdings ermittelt und verkündet der Roboter am Ende zusätzlich, wie viele Eckpunkte die Form hat, die den Grundriss der Wand bildet.
Aufgabe für Simulanten: Die gleiche wie für Tiger.