


Deadline of this assignment is set to: 2025-03-22 20:00:00
1. Task: Cameraman
Even in Slovakia we have some companies that produce movies, or at least various video clips. When filming a particular scene, it is often needed to have the cameraman positioned from various angles and locations above the scene. In this task, we are going to use the gyro sensor that allows to read the current inclination and rotation of the control hub. The movement of the cameraman will be controlled by tilting the hub.
Task for rabbits: Build and program a mechanism that will allow the cameraman to move to an arbitrary 3D position in the space, from which he or she will be able to film the movie scene. The cameraman can be represented by a simple LEGO figure. It is important that the cameraman can reach any location in the 3D space - only through tilting/rotating the control hub that a movie director holds in his hand.
Task for tigers: Similar to the rabbit task, but when a particular location in the 3D space is reached, we can store it using a hub button as the starting location, then move the cameraman to a target position, and confirm that with a button as well. Finally, the user can use the hub buttons to specify a movement time interval - the duration of the movement from the starting to the target position. After the time is confirmed, the cameraman will be moved back to the starting position and after the scene is started, again by pressing a button (the movie flap claps), the machine will move the cameraman as fluently, smoothly and linearly as it gets to the target position.
Task for simulants: The task is the same as for tigers, but instead of 3D space, we operate the robot in 2D space and the third dimension is represented by the rotation (i.e. the robot will have a configurable starting and ending rotation, but during the movement, it has to be facing the target location. Instead of using the gyro to control the robot, we utilize the control unit buttons to steer the cameraman robot. 
Obrázok: kameraman, zdroj: LEGO.com
2. Task: Hide and Seek
The city district has decided to build a new modern kindergarten, which will have an unusual shape, among other things. However, the kindergarten teacher knows that children like to play hide-and-seek, and therefore there should be at least two places in the room that are not visible to each other. The plan of the playroom for the kindergarten is shown by a thick black line on the floor.
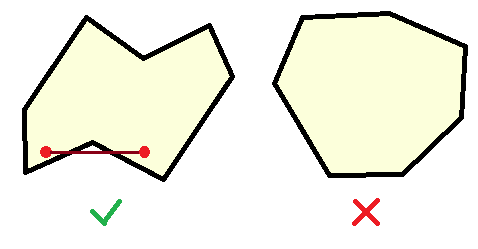
Task for rabbits: The robot is in front of a room plan. It should determine whether there are at least two points in the room that cannot be seen from one to the other - that is, if we connect them with a straight line, then this line passes through a wall.
Task for tigers: The same as the task for rabbits, but the robot also determines and announces at the end how many vertices the shape that forms the floor plan of the wall has.
Task for simulants: The same as for tigers.