


Riešenie možno odovzdávať do: 19.04.2025 20:00:00
1. Úloha: Horelezec II
Blíži sa leto a znovu bude možné tráviť viac času v prírode. Skoro každý, kto má rád hory, rád lezie na skaly. Dnešnou témou je opäť horolezec.
Obrázok: ilustračný obrázok horolezca (pixabay).
Úloha pre tigre: robot sa nachádza pred nejakou stenou, alebo hrazdou, ktorá je aspoň v približne trojnásobnej výške ako je výška robota. Úlohou robota je vyhodiť lano/špagát s nejakou kotvou, ktorá sa o vrch steny/hrazdu nejakým spôsobom zachytí a následne sa pomocou motorov robot vytiahne hore tak, aby "videl" cez vrch steny, alebo hrazdu na druhú stranu.
Úloha pre zajace: robot sa nachádza na vrchu nejakej steny, jeho lano je niekde na vrchu steny pevne zachytené. Robot sa vlastnou silou vysunie zo steny tak, aby mohol na svojom lane visieť, postupne ho uvoľňuje, čím sa spustí po lane pomocou motorov nadol, kde lano opustí a od steny vlastnou silou odíde preč.
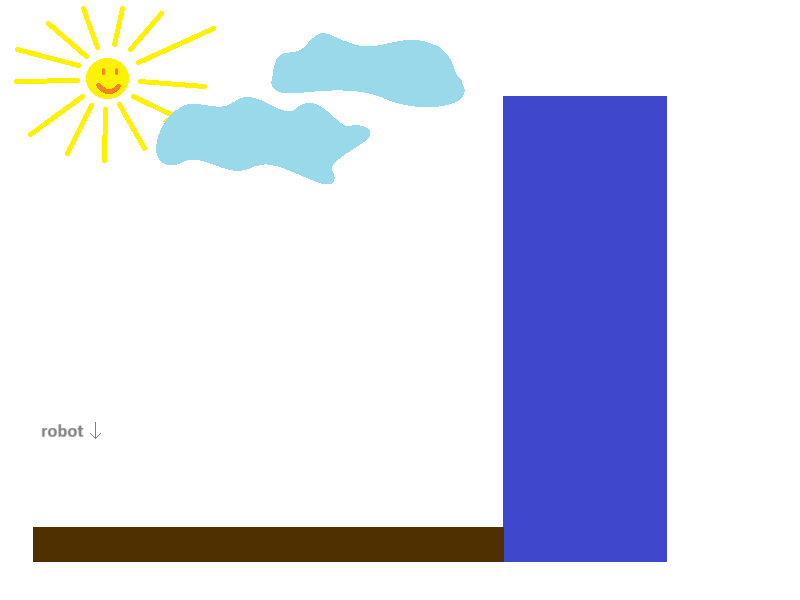
Úloha pre simulantov: robot sa nachádza na označenom mieste - pred ním je dlhší rovný úsek hnedej hlinenej podložky na konci ktorej je vysoká zvislá modrá stena (všetko nakreslené priamo v pozadí simulátora). Úlohou robota je prejsť "po zemi" až k stene a potom presne po okraji steny "vyliezť" nahor a navrch steny, kde oznámi dosiahnutie cieľa - napríklad farebne zabliká, alebo vypíše správu na displeji. Ten istý program bude fungovať v rôznych situáciách - pre rôzne vzdialené a rôzne vysoké steny, napríklad: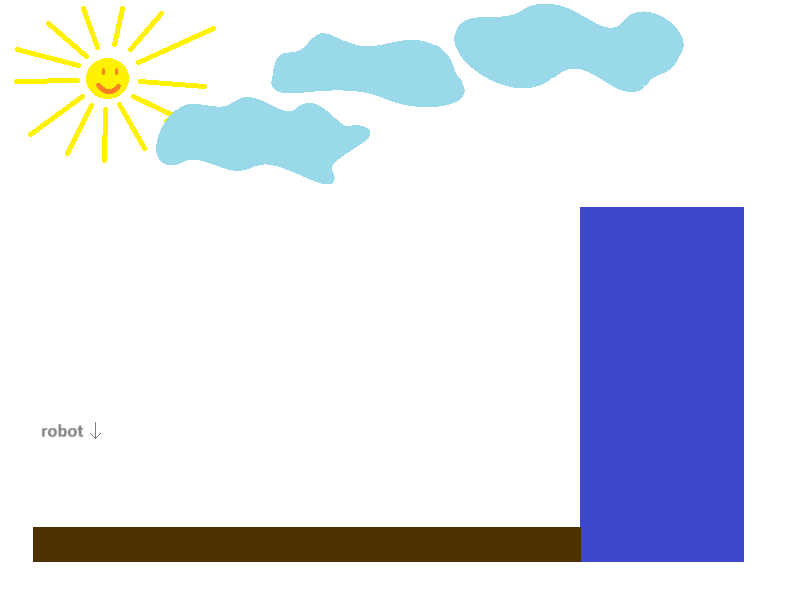
2. Úloha: Apollo 14
Apollo 14 bola tretia misia, ktorá s posádkou pristála na Mesiaci. V roku 1971 pristáli astronauti Alan Shepard a Edgar Mitchell na povrchu Mesiaca, kým tretí astronaut Stuart Rosa zostal na obežnej dráhe. Jedna z hlavných úloh, ktorú mali astronauti splniť, bolo dostať sa v ich druhom výstupe ku kráteru Cone (má kužeľovitý tvar). Boli však veľmi vyčerpaní z predchádzajúceho programu a v náročných podmienkach medzi "púštnymi kopcami" sa veľmi ťažko orientovali. Mesačný prach bol taký jemný, že zasypával ich vlastné stopy. Navigácia bola náročná, k dispozícii mali odhad počtu krokov, pozíciu Slnka a význačné objekty v okolitom teréne.
https://svs.gsfc.nasa.gov/vis/a000000/a004800/a004883/4883_Apollo14HikeCone_YouTubeHD.mp4
Hoci prišli skoro k tesnej blízkosti krátera, pre obavy, že im nevydržia zásoby kyslíka dostali z riadiaceho strediska príkaz na spiatočnú cestu. Tá ale v náročných podmienkach nebola o nič jednoduchšia. Museli sa čiastočne spoľahnúť na vlastnú pamäť, aby sa dostali späť k mesačnému modulu...
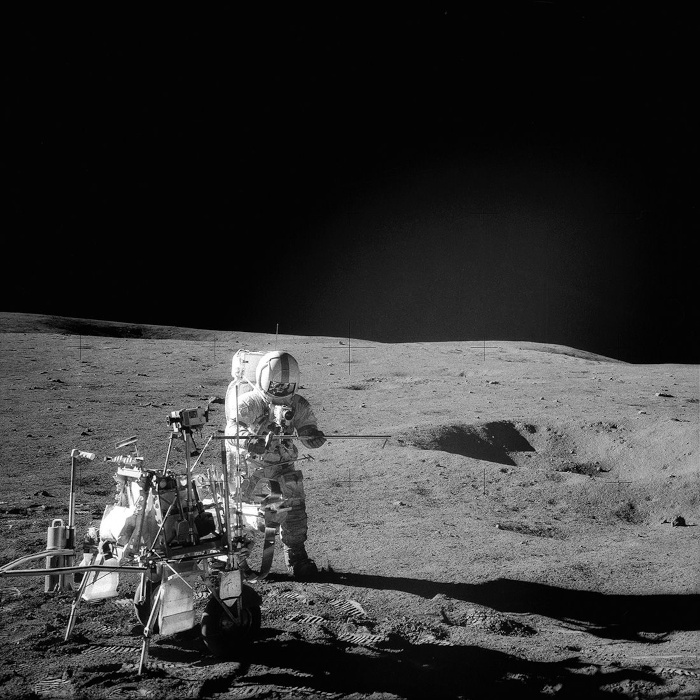
Obrázok: Veliteľ misie Apollo 14, Alan Shepard, stojí vedľa MET (Modular Equipment Transporter), ktorý astronauti používali na prevážanie prístrojov a zozbieraných vzoriek a pomenovali si ho "ríkša". zdroj: NASA.
Úloha pre tigre: Robot sa nachádza na začiatku kľukatej čiernej čiary prechádzajúcej pomedzi nebezpečné prekážky, ktorých sa robot nesmie dotknúť. Pomocou sledovania čiary sa robot dokáže dostať až do cieľa (označený napr. červeným územím, alebo nejakým iným detekovateľným spôsobom). Po dosiahnutí cieľa program neskončí, ale počká, kým mu operátor neodoberie senzor, položí ho naspäť na čiaru opačným smerom a stlačí tlačidlo. Následne sa robot vráti opačným smerom po čiare spamäti bez použitia senzora naspäť na štart. Ako presne bude dráha vyznačená čiarou vyzerať necháme na Vás - môžete experimentovať s rôznymi situáciami a tvarmi a vyskúmať, ktoré dráhy sú na zapamätanie jednoduchšie/spoľahlivejšie a ktoré sú zložitejšie, ale na čiare musia byť nejaké zákruty/zmeny smeru.
Úloha pre zajace: Robot sa po odobratí senzora pohybuje rovnakým smerom, ako počas "tréningu" - nie opačným, znovu prejde po čiare zo štartu do cieľa, ale spamäti, bez použitia senzora.
Úloha pre simulantov: rovnaká úloha ako pre tigre.