


Deadline of this assignment is set to: 2026-05-12 20:00:00
1. Task: Animation
Všimli ste si niekedy vo filme, že sa napríklad koleso auta najskôr krútilo jedným smerom a potom sa zrazu zdalo, akoby sa krútilo opačne? Tento jav súvisí so snímkovaním kamery a s tým, ako často kamera zaznamenáva obraz.
Úloha pre tigre: Zostrojte model so zrýchľovacím ozubeným prevodom, v ktorom sa bude nejaké koleso alebo kotúč otáčať rýchlo. Skúmajte, či sa Vám podarí pri nahrávaní kamerou mobilného telefónu dosiahnuť efekt, že sa koleso bude na videu javiť ako:
-
stojace,
-
pomaly sa otáčajúce,
-
alebo dokonca sa otáčajúce opačným smerom.
Skúste postupne meniť rýchlosť otáčania a pozorujte, pri akých rýchlostiach sa tento jav objaví. Môžete využiť aj koleso s farebnými alebo dvojfarebnými „rebrami“, aby bol efekt lepšie viditeľný.
Ak sa Vám jav podarí, zdokumentujte ho videom. Ak sa Vám ho nepodarí dosiahnuť, pokúste sa vysvetliť prečo.
Ďalej:
-
zmerajte rýchlosť otáčania motora pomocou otáčkového senzora,
-
vypočítajte zrýchľovací pomer prevodu,
-
odhadnite alebo vypočítajte výslednú rýchlosť otáčania kolesa,
-
porovnajte výpočet s tým, čo ste pozorovali na videu.
Podarí sa Vám vytvoriť program, ktorý bude podľa požiadavky používateľa meniť zdanlivú „inverznú“ rýchlosť kolesa na videu?
Úloha pre zajace: Vytvorte robotickú konštrukciu, ktorá umožní sledovať jednoduchý kreslený animovaný film.
Spôsob konštrukcie necháme na Vás. Môže sa v nej niečo otáčať, pohyb môže byť rozložený do viacerých fáz, naraz môže byť viditeľné iba jedno okienko alebo aj viacero fáz súčasne. Môže byť výsledok pozorovateľný voľným okom alebo až po nafilmovaní. Využite svoju tvorivosť, ale najskôr si riešenie dobre premyslite a navrhnite.
Váš systém by mal umožňovať:
-
spustenie animácie tlačidlom,
-
zastavenie animácie tlačidlom,
-
a ak sa podarí, aj plynulú zmenu rýchlosti animácie podľa zadania používateľa.
Napríklad by mohlo byť možné meniť rýchlosť animácie otáčaním kolieska doprava a doľava, alebo iným vlastným spôsobom.
Nasledujúce videá Vás môžu inšpirovať:
Úloha pre simulantov: Vytvorte program, ktorý nakreslí niekoľko fáz animovanej postavičky (alebo niečoho iného) do grafickej plochy pomocou pohybov robota.
Takto vytvorený obrázok:
-
zosnímajte funkciou odfotenia obrazovky,
-
uložte do súboru,
-
vytlačte,
-
vystrihnite štrbinky,
-
napichnite na vhodnú rukoväť
-
a vytvorte tak jednoduchý fenakistoskop.
Potom sa pokúste výsledok roztočiť a nafilmovať.
Inšpirácia:
2. Task: Elastic and inelastic collisions of robots
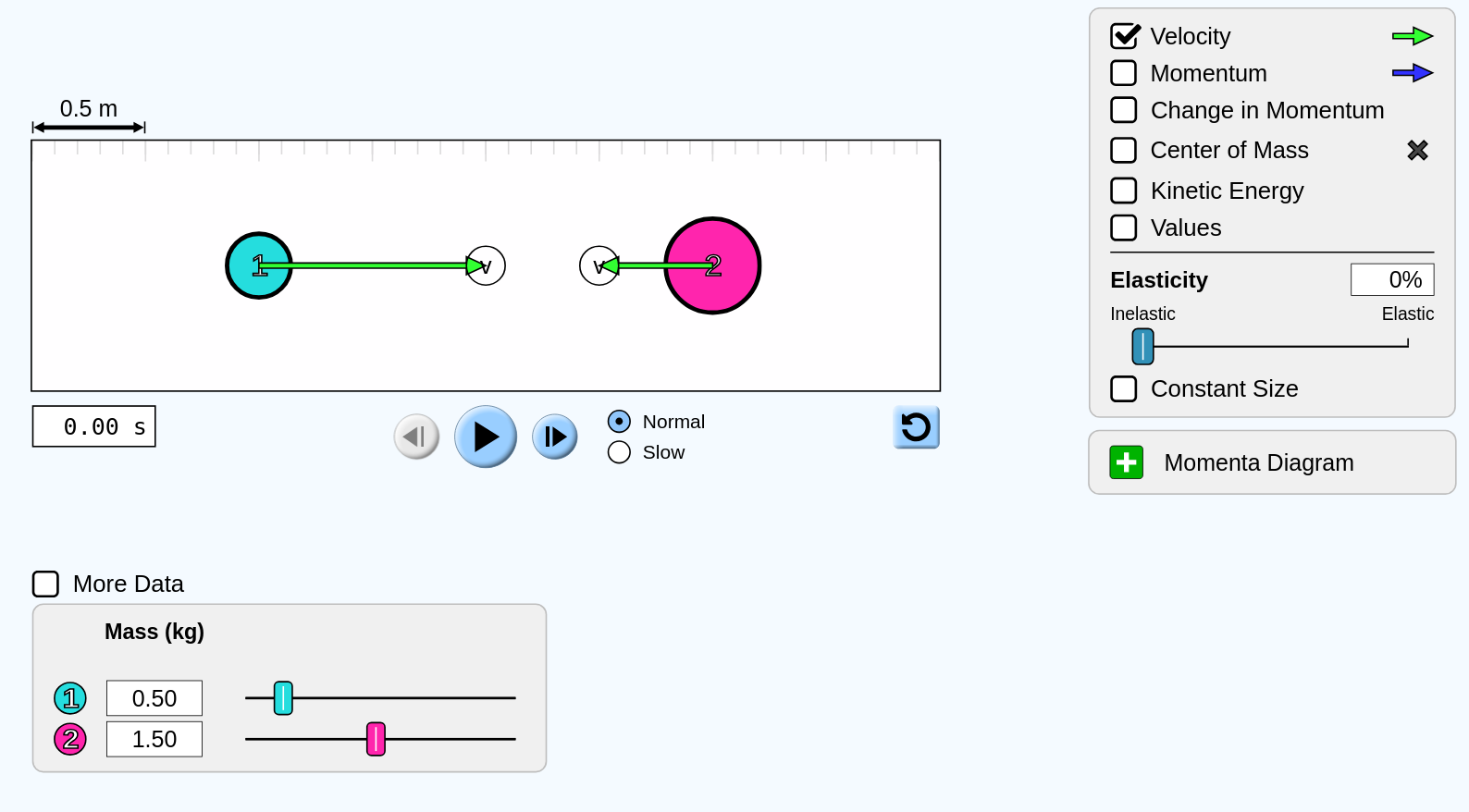
Keď sa zrazia dva predmety pohybujúce sa oproti sebe, po zrážke môžu nastať rôzne situácie. Buď sa pohybujú spolu ako jeden celok - vtedy ide o tzv. nepružnú zrážku, alebo sa od seba odrazia a ďalej sa pohybuje každé zvlášť - často aj v inom smere ako pôvodne - v závislosti od ich rýchlostí a hmotností, vtedy je to pružná zrážka. V každom prípade však platí zákon zachovania hybnosti.
Vyskúšajte sa najskôr zahrať v simulátore zrážok:
Úloha pre zajace: zostrojte dva vozíky, ktoré sa pohybujú takmer bez trenia a dokážu sa zraziť v pružnej zrážke. Na odraz môžete využiť napríklad LEGO gumičky. Aspoň jeden z vozíkov bude niesť aj riadiacu jednotku (hub) a pomocou senzorov zisťovať svoju rýchlosť - napr. opakovaným meraním ultrazvukovým senzorom a/alebo pomocou farebného senzora a pravidelného vzoru na podlahe. Program bude merať rýchlosť jedného vozíka pred zrážkou aj po zrážke, bude mať zadané hmotnosti oboch vozíkov a z týchto údajov vypočíta a zobrazí rýchlosť druhého vozíka pred zrážkou a po zrážke. Ak máte dve riadiace jednotky - zmerajte rýchlosť aj na druhom vozíku, porovnajte vypočítané a namerané údaje a diskutujte, prečo sa môžu líšiť.
Všimnite si: pri pružnej čelnej zrážke, ak sa jeden vozík pred zrážkou nepohybuje, platí jednoduchý výsledok: ak majú vozíky rovnakú hmotnosť, jednoducho si vymenia rýchlosti.
Úloha pre tigre: Vyriešte úlohu pre zajace aj pre pružnú aj pre nepružnú zrážku. Ak bude treba, na absorbovanie odrazu môžete použiť aj nejaké neLEGOvé materiály.
Úloha pre simulantov: Vytvorte program, ktorý bude simulovať pružnú zrážku dvoch robotov. V simulátore vytvorte dva roboty, ktoré sa budú pohybovať buď oproti sebe alebo v tom istom smere rôznou rýchlosťou. Keď sa priblížia na krátku vzdialenosť - čo zistia pomocou senzorov, odrazia sa od seba v pružnej zrážke. Ich hmotnosti sa budú dať nastaviť a simulácia zohladní ich hmotnosti na určenie výslednej rýchlosti a smeru po zrážke.