


Die Frist für diese Aufgabe ist festgelegt auf: 07.06.2020 20:00:00
1. Auftrag: Die langsamste messbare Bewegung
Bei den bisherigen Aufgaben haben wir die schnellsten und langlebigsten Bewegungen geschaffen. Dieses Mal werden wir uns auf das entgegengesetzte Extrem konzentrieren: Das Ziel ist es, die langsamste Bewegung zu schaffen, die noch messbar ist. Nach dem Guinness-Buch der Rekorde braucht die am langsamsten rotierende, von Menschenhand geschaffene Maschine 3,8 Milliarden Jahre, um sich einmal zu drehen.
Aufgabe: Baut einen Mechanismus, der einen Teil seiner Konstruktion fortwährend rotieren lässt, wobei die Zeit bis zum einmaligen Drehen die längste mögliche, aber immer noch messbare sein soll. Verwendt LEGO-Sensoren, um eine nachweisbare regelmäßige Drehbewegung der Maschine zu messen, auch wenn dies Wochen dauern wird. Berechnet die für eine volle Umdrehung benötigte Zeit. Die Bewegung muss ununterbrochen und kontinuierlich sein, und nachdem sie begonnen hat (der Startvorgang kann bei Bedarf komplizierter sein), dreht sich der Motor in einer permanenten Rotation weiter (dies entspricht einem einzelnen grünen EV3-Motorblock im "Ein"-Modus).
2. Auftrag: Erneut geht es um Widerstandskraft
Beim Bau eines Roboters ist eine der wichtigsten Entscheidungen, die es zu treffen gilt, die Auswahl der Motoren. Bei der Auswahl ob Gleichstrommotoren mit Getriebe, Servomotoren oder Schrittmotoren zu wählen sind, ist ein Parameter ist von besonderer Bedeutung: das Motordrehmoment. Es gibt die Kraft an, die der Motor erzeugen kann. Wenn unser Roboter beispielsweise einen Hügel erklimmen soll, entscheidet das Drehmoment der Motoren, ob der Roboter es schaffen wird oder nicht. Dieser Wert ändert sich normalerweise mit der Drehgeschwindigkeit. Beispielsweise sind Schrittmotoren sehr stark, wenn sie sich langsam bewegen oder wenn sie ganz zum Stillstand kommen, aber ihr Drehmoment nimmt mit zunehmender Rotationsgeschwindigkeit ab. Und natürlich hängt das Drehmoment auch von der an die Motoren angelegten Spannung ab. Bei höherer Spannung wird der Motor normalerweise stärker. Mehrere verschiedene Einheiten werden verwendet, um das Drehmoment auszudrücken, d.h. kg.cm, N.m, und in einigen Ländern auch lbf-ft (pound-foot), um eine zu nennen. In allen Fällen sagt der Wert folgendes aus: Wenn ein Hebel der Länge r (hier sind es die cm oder m) an der Drehachse des Motors in senkrechter Richtung angebracht ist, kann der Motor ein am Ende des Hebels angebrachtes Gewicht in senkrechter Richtung zum Hebel und zur Achse heben, das den Motor mit der gegebenen Kraft (N) oder dem gegebenen Gewicht (kg) zieht. Zum Beispiel hat ein populäres Mikroservo SG-90 ein übliches Drehmoment von etwa 1,2 kg.cm, d.h. 0,118 N.m (ja, wir verwenden die Erdanziehungskraft, die nicht genau 10 beträgt, wenn wir zwischen den Einheiten umrechnen), aber das Abwürgemoment - d.h. das Drehmoment bei Drehzahl Null, d.h. wenn die Kraft die Motorbewegung vollständig stoppt, beträgt angeblich 1,8 kg.cm. Wenn der Hebel also 10 cm lang ist, wird es dem SG-90 schwerfallen, ein am Ende des Hebels angebrachtes Gewicht von 180 g zu heben.
Betrachten Sie einen festen Gegenstand, der auf einer flachen Oberfläche gleitet. Eine Widerstandskraft zwischen dem Objekt und der Oberfläche wirkt der Gleitbewegung entgegen. Diese Widerstandskraft ist unterschiedlich, je nachdem, ob das Objekt noch nicht in Bewegung ist oder ob es bereits in Bewegung gesetzt wurde. 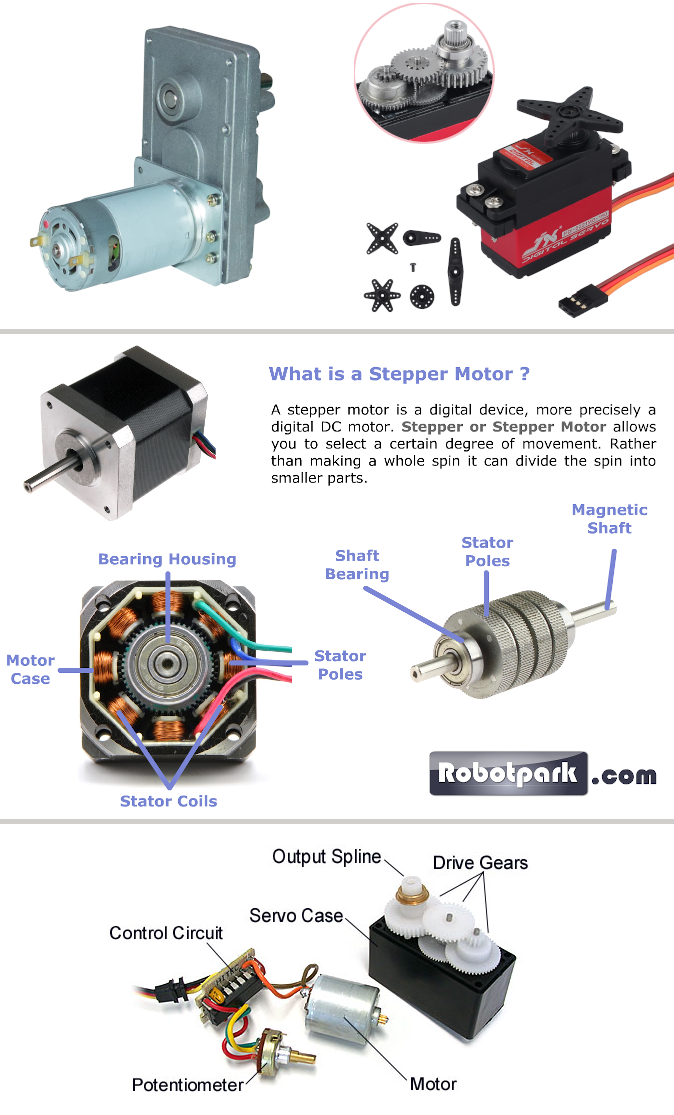
Abbildung: verschiedene Arten von Motoren: oben links: ein Gleichstrommotor mit Getriebe, oben rechts: Servomotor, Mitte: Schrittmotor und unten: Einbauten eines Servomotors.
Aufgabe: Messt zunächst das Drehmoment eines Motors im Roboterbausatz mit hoher Genauigkeit, versucht verschiedene Einstellungen der "Leistung" in der Software. Schließt die Steuereinheit an das Ladegerät an (wenn möglich bei der Durchführung der Messungen). Bestimmt anhand der gemessenen Werte die Größe der Stillstandswiderstandskraft für Objekte, die aus verschiedenen Materialien bestehen und unterschiedliches Gewicht haben, und stellt die Ergebnisse in einer Tabelle dar.