


Riešenie možno odovzdávať do: 07.06.2020 20:00:00
1. Úloha: Najpomalší zmerateľný pohyb
V predchádzajúcich úlohách sme vytvárali najrýchlejší pohyb a taký, čo sa vydrží točiť čo najdlhší čas. Tento raz sa zameriame na opačný extrém: cieľom bude vytvoriť čo najpomalší pohyb, ktorý sa ešte stále dá zmerať. Podľa Guinnessovej knihy rekordov sa najpomalšie otáčajúci stroj vyrobený človekom otočí raz za 3,8 miliárd rokov.
Úloha: zostrojte mechanizmus, ktorý bude časťou svojej konštrukcie točiť stále dookola, ale doba otočenia bude najdlhšia možná, hoci stále zmerateľná. Pomocou LEGOvých senzorov zmerajte dokázateľný pravidelný otočný pohyb zariadenia, aj keby to malo trvať týždne a vypočítajte čas potrebný na jedno celé otočenie. Pohyb musí byť plynulý, čiže potom, čo sa mechanizmus naštartuje (začiatočná štartovná procedúra môže byť aj zložitejšia, ak treba), sa bude motor otáčať rovnomerným neprerušovaným pohybom (ekvivalent jedného zeleného pohybového EV3 bloku v režime "on").
2. Úloha: Ešte raz odporová sila
Pri stavbe robota je jedným zo základných rozhodnutí výber motorov. Či už to budú obyčajné sprevodované motorčeky na jednosmerný prúd, servo motory, alebo krokové motory, jeden parameter je dôležitý: krútiaci moment. Udáva akú silu motor dokáže vyvinúť. Napríklad, ak má náš robot vyjsť do kopca, od krútiaceho momentu závisí, či ho vytiahne. Tento údaj sa často líši pri rôznych otáčkach - napr. krokové motory vedia tlačiť najväčšou silou na najnižších otáčkach, alebo keď celkom zastanú, avšak pri vyšších rýchlostiach ich krútiaci moment klesá. Okrem toho to pochopiteľne závisí od napätia, ktoré na motor privádzame, pri vyššom napätí bude motor väčšinou silnejší. Krútiaci moment sa udáva v rôznych jednotkách, napr. kg.cm, N.m, a v niektorých konzervatívnych a zaostalejších krajinách, kde (nielen) vedecké štandardy preberajú pomalšie, napr. lbf-ft (pound-foot). Vo všetkých prípadoch to hovorí, že ak na motor upevníme kolmo na jeho os otáčania páku nejakej dĺžky r (to sú tie cm, alebo m), tak motor utiahne závažie, ktoré na konci tej páky (znovu kolmo - aj na tú páku, aj na os otáčania) tlačí príslušnou silou (N), resp. má príslušnú hmotnosť (kg). Napr. bežné servo SG-90 má bežný krútiaci moment približne 1.2 kg.cm, čiže 0.118 N.m (áno, pri prepočítavaní vstupuje do hry tiažové zrýchlenie, ktoré nie je presne 10), ale tzv. "stall torque" - čiže krútiaci moment pri nulových otáčkach, čiže keď ho protisila celkom zastaví, má vraj až 1.8 kg.cm. To znamená, že ak páka meria napr. 10 cm na dĺžku, tak tento motor zvládne vydvihnúť závažie hmotnosti 180 g.
Keď pevným telesom chceme pohybovať po podložke, tak nám v tom bráni odporová sila medzi telesom a podložkou, ktorá jeho pohyb brzdí. Táto odporová sila je rôzna v prípade, že teleso sa ešte nehýbe (pokojové trenie) a iná keď sa už pohybuje. 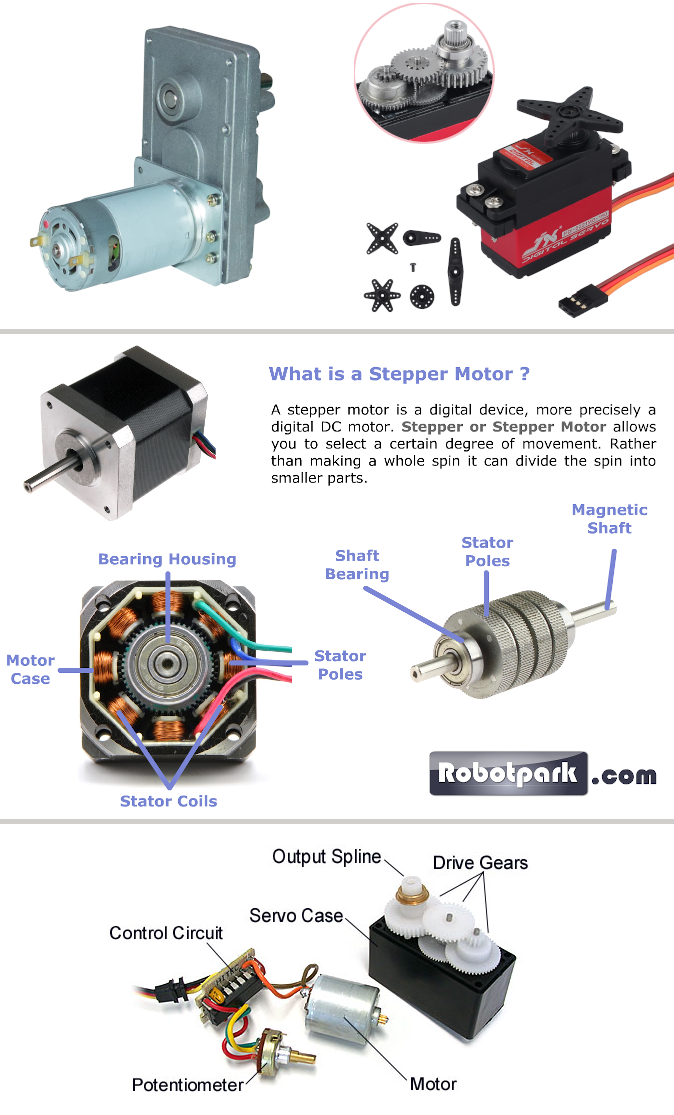
Obrázok: rôzne typy motorov, hore vľavo: motor na jednosmerný prúd s prevodovkou, vpravo hore servo motor, v strede krokový motor a dolu vnútornosti servo motora.
Úloha: najskôr čo najpresnejšie zmerajte krútiaci moment pri nulových otáčkach (stall torque) motorov vo Vašej stavebnici pri rôznych nastaveniach parametra "power" - ak je to možné, tak za situácie, keď je robot pripojený na nabíjací adaptér. Využite takto zmeraný údaj na to, aby ste určili veľkosť odporovej sily pokojového trenia pre predmety z rôznych materiálov a s rôznou hmotnosťou, svoje meranie zobrazte v tabuľke.