


Deadline of this assignment is set to: 2016-05-03 20:00:00
1. Task: Effective attachments and measuring distances
We have moved the deadline by one week, so you can improve your solution, if you like to.
One of the main challenges of building a successful robot for FLL is to create an efficient method of connecting and releasing attachments. Since time never stops, adding and removing attachments from the robot should be very simple and straight-forward. Ideally, simply placing and picking up the attachment should do the work. One (or more) of the motors should be automatically connected to the attachment that is placed on the robot so that it can perform some action. You can look at some example how IT-PRO-BESST team solved this challenge in the previous FLL season.
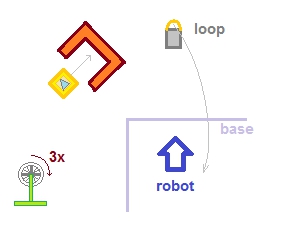
Task: Build and program a robot with two motors used for propelling its wheels and with a third motor for controlling the attachments. Create three easily removable attachments. The first one will be used to lift up and pick up a loop, you can use the plastic bag from previous season for instance. The second attachment will move a plastic box with toy plane (or similar) in a horizontal direction so that it will land in a U-box storage place mounted to the floor with dual-locks. The third will be used to rotate a large wheel by three rotations. The direction of the wheel is not important. For example, it can be placed perpendicularly to the arrival direction of the robot from the Base. You can build the field according to the following plan:
Focus on the efficiency of connections and removals, they should be quick and reliable. Each of the three operations are to be performed by the same motor mounted on the robot. Play around with the solution, try different ways, and document visually the best solution you find.
2. Robot is located at a random location and in random orientation in a rectangular arena (FLL table alike). Write a program for this robot to make it move to:
A) that one of the four walls, which is closest to its starting location,
B) that one of the four walls, which is furthest to its starting location,
After the robot will reach the final location next to the wall, it will produce a sound singal.
Do not hesitate to join us even if you did not solve the earlier tasks!
One of the main challenges of building a successful robot for FLL is to create an efficient method of connecting and releasing attachments. Since time never stops, adding and removing attachments from the robot should be very simple and straight-forward. Ideally, simply placing and picking up the attachment should do the work. One (or more) of the motors should be automatically connected to the attachment that is placed on the robot so that it can perform some action. You can look at some example how IT-PRO-BESST team solved this challenge in the previous FLL season.
Task: Build and program a robot with two motors used for propelling its wheels and with a third motor for controlling the attachments. Create three easily removable attachments. The first one will be used to lift up and pick up a loop, you can use the plastic bag from previous season for instance. The second attachment will move a plastic box with toy plane (or similar) in a horizontal direction so that it will land in a U-box storage place mounted to the floor with dual-locks. The third will be used to rotate a large wheel by three rotations. The direction of the wheel is not important. For example, it can be placed perpendicularly to the arrival direction of the robot from the Base. You can build the field according to the following plan:
|
Focus on the efficiency of connections and removals, they should be quick and reliable. Each of the three operations are to be performed by the same motor mounted on the robot. Play around with the solution, try different ways, and document visually the best solution you find.
2. Robot is located at a random location and in random orientation in a rectangular arena (FLL table alike). Write a program for this robot to make it move to:
A) that one of the four walls, which is closest to its starting location,
B) that one of the four walls, which is furthest to its starting location,
After the robot will reach the final location next to the wall, it will produce a sound singal.
Do not hesitate to join us even if you did not solve the earlier tasks!