


Riešenie možno odovzdávať do: 03.05.2016 20:00:00
1. Úloha: Efektívne doplnky a meranie vzdialenosti
Termín sme posunuli o týždeň, môžete svoje riešenia ešte upravovať a vylepšovať, ak chcete.
Jedna z najväčších výziev počas stavby robota na FLL je vymyslieť efektívny spôsob pripájania a odpájania nadstavcov. Keďže ide o sekundy, malo by to fungovať tak, že každý doplnok sa dá ľahko pripojiť a ľahko odpojiť - ideálne tak, že sa jednoducho z robota nadvihne alebo na neho položí. Malo by to fungovať tak, že (aspoň) jeden z motorov robota je potom hneď prevodom pripojený na nový namontovaný doplnok. Pozrite sa, ako sa s tým popasoval tím IT-PRO-BESST v predchádzajúcom ročníku FLL.
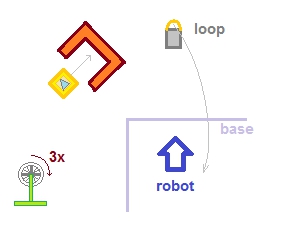
Úloha: Zostrojte a naprogramujte robota, ktorý bude mať dva motory na pohon kolies a tretí motor na riadenie pripájaných doplnkov. Vyrobte k nemu tri ľahko pripojiteľné a odpojiteľné doplnky: prvý z nich bude slúžiť na nadvihnutie (napichnutie) slučky, napríklad plastovej tašky z predchádzajúceho ročníka FLL. Druhý bude slúžiť na posunutie plastovej krabice s lietadlom (alebo podobnej) vo vodorovnom smere vpravo tak, aby bola umiestnená vo vnútri odkladacieho priestoru v tvare U pripevneného o podložku dual-lockmi. Tretí bude slúžiť na otočenie veľkého kolesa o tri otáčky. Na orientácii kolesa až tak nezáleží, ale môže byť napr. kolmo na smer, ktorým robot príde od Základne. Ihrisko si môžete zostrojiť napríklad podľa nasledujúceho plániku:
Zamerajte sa najmä na to, aby sa doplnky dali efektívne, čiže rýchlo a spoľahlivo pripájať a odpájať, každú z troch uvedených operácií má robot vykonať pomocou toho istého tretieho motora, ktorý je na ňom namontovaný. Pohrajte sa s riešením, vyskúšajte rôzne spôsoby, najlepší výsledok dobre a viditeľne zdokumentujte.
2. Robot sa nachádza na náhodnom mieste a v náhodnom otočení v obdĺžnikovej miestnosti (napríklad niekde na stole FLL). Naprogramujte ho tak, aby sa nejakým spôsobom dostal:
A) k tej zo štyroch stien, ktorá bola na začiatku od jeho polohy najbližšie,
B) k tej zo štyroch stien, ktorá bola na začiatku od jeho polohy najďalej.
Po dosiahnutí cieľového miesta zastane a vydá zvukový signál.
Jedna z najväčších výziev počas stavby robota na FLL je vymyslieť efektívny spôsob pripájania a odpájania nadstavcov. Keďže ide o sekundy, malo by to fungovať tak, že každý doplnok sa dá ľahko pripojiť a ľahko odpojiť - ideálne tak, že sa jednoducho z robota nadvihne alebo na neho položí. Malo by to fungovať tak, že (aspoň) jeden z motorov robota je potom hneď prevodom pripojený na nový namontovaný doplnok. Pozrite sa, ako sa s tým popasoval tím IT-PRO-BESST v predchádzajúcom ročníku FLL.
Úloha: Zostrojte a naprogramujte robota, ktorý bude mať dva motory na pohon kolies a tretí motor na riadenie pripájaných doplnkov. Vyrobte k nemu tri ľahko pripojiteľné a odpojiteľné doplnky: prvý z nich bude slúžiť na nadvihnutie (napichnutie) slučky, napríklad plastovej tašky z predchádzajúceho ročníka FLL. Druhý bude slúžiť na posunutie plastovej krabice s lietadlom (alebo podobnej) vo vodorovnom smere vpravo tak, aby bola umiestnená vo vnútri odkladacieho priestoru v tvare U pripevneného o podložku dual-lockmi. Tretí bude slúžiť na otočenie veľkého kolesa o tri otáčky. Na orientácii kolesa až tak nezáleží, ale môže byť napr. kolmo na smer, ktorým robot príde od Základne. Ihrisko si môžete zostrojiť napríklad podľa nasledujúceho plániku:
|
Zamerajte sa najmä na to, aby sa doplnky dali efektívne, čiže rýchlo a spoľahlivo pripájať a odpájať, každú z troch uvedených operácií má robot vykonať pomocou toho istého tretieho motora, ktorý je na ňom namontovaný. Pohrajte sa s riešením, vyskúšajte rôzne spôsoby, najlepší výsledok dobre a viditeľne zdokumentujte.
2. Robot sa nachádza na náhodnom mieste a v náhodnom otočení v obdĺžnikovej miestnosti (napríklad niekde na stole FLL). Naprogramujte ho tak, aby sa nejakým spôsobom dostal:
A) k tej zo štyroch stien, ktorá bola na začiatku od jeho polohy najbližšie,
B) k tej zo štyroch stien, ktorá bola na začiatku od jeho polohy najďalej.
Po dosiahnutí cieľového miesta zastane a vydá zvukový signál.