Deadline of this assignment is set to: 2016-06-17 22:00:00
1. Task: Baker and Space ship
| 1. A baker pulled four square pieces of baked pastry for a big cake out of the oven. They are all of a square shape, but every square has a different side length. He has spread the pudding cream and fruits on top of every one of them and now he needs to build them into a form of a four-layer cake. He has not been paying enough attention before baking and thus the squares are in a random order.
Task: Four blocks with a top-view square shape with side of a different length each are built from LEGO bricks. They are placed on the floor in front of the robot. They are not ordered based on their size, they are in a random order. Feel free to use special marks/lines that will allow the robot to find their locations easier, if needed. The task for the robot is to place them on top of each other so that they will be ordered based on their size: the largest will be at the bottom and the smallest at the top. |  |
 | 2. The warm evenings and nights are here. They are a nice opportunity to observe the stars and space, which will be our topic this time. In the latest issue of the Communications of the ACM, Louis Friedman, a founder and director of Planetary Society, who worked in NASA on deep space exploration missions, reasons about the future of robot and human co-existence while exploring the space. He writes that the exploration will be partly virtual, partly real, but it will be based on cooperation where the humans and robots will together form a common species dwelling on multiple planets. |
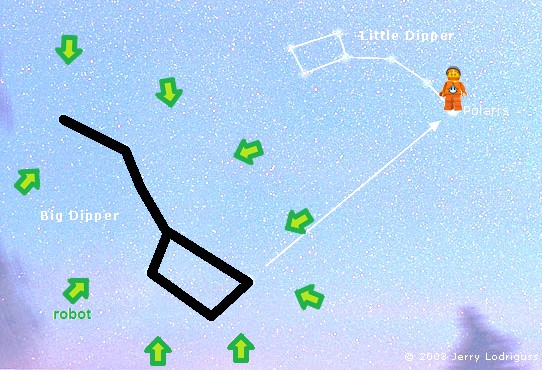
Travelers and sailors have used stars for navigation in the past. The most famous one being probably the Polaris star, which always shines from the North. It can be found by prolonging the front part of the Big Dipper in the constellation of Ursa Major by approximately 5 times its length. Will your robot be able to navigate with the help of Big Dipper?
Task: Big Dipper is formed by a black tape on a bright floor as shown at the picture. The robot is located at an arbitrary location around the constellation and it is directed towards the constellation - to its arbitrary part. The task for the robot is to place a mark at the Polaris star as precisely as possible (there is nothing but the black line on the floor). The green arrows show example starting locations of the robot.