


Deadline of this assignment is set to: 2018-03-16 20:00:00
1. Task: Minesweeper
Many armies around the world spread tears, misery and despration.
Others then try to return livable conditions at least somehow.

Figure: demining machine, source: bozena.eu.
Task: Build and program a demining robot. A white square area with side length 1 m contains several randomly placed mines - black marks that fit into a square of 2 x 2 cm. Robot dimensions when starting do not exceed a square 25 x 25 cm. The front part of the robot forms a clearly identifiable deactivation zone. It must reach each mine first. The robot uses it to detect the mine. It must then stop and produce a sound signal. Only then the mine is considered to be deactivated and the robot can drive over it. If the robot drives over a mine that has not been deactivated, the mission terminates with the robot being destroyed.
2. Task: Cave exploration
Speleologists have a difficult job, they risk not to be able to get back out from the cave.

Figure: Demänovská jaskyňa slobody, source: pamiatkyslovenska.wordpress.com
Task: build and program a robot that will explore a perpendicular cave. Robot starts in front of the only exit from the cave. It contains only rooms and corridors where all corners are 90 degrees turns. The robot will travel through the whole cave using the right-hand rule: whenever it is possible to turn right, it will do so, otherwise, it will continue straight, unless the path is blocked. In that case it will turn left, if possible. If no direction remains free, it will turn around and return back. Finally, it will exit the cave using the same entrance as it used to enter the cave.
Example:
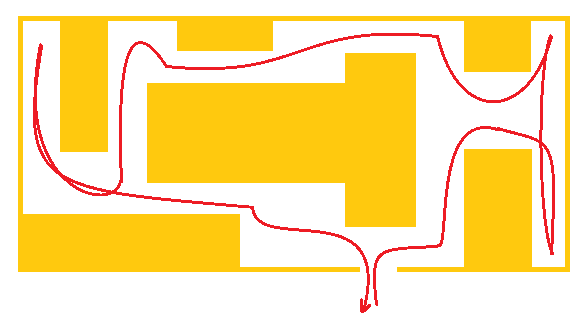
Obrázok: príklad prechodu jaskyňou pravidlom pravej ruky.