Die Frist für diese Aufgabe ist festgelegt auf: 08.05.2020 20:00:00
1. Auftrag: Schwungrad
Jeder hat schon einmal mit einem schwungradbetriebenen Automodell gespielt. Wenn sich das Schwungrad dreht, wird eine große Menge kinetischer Rotationsenergie angesammelt, und so kann das Spielzeugmodell eines Autos sogar mehrere Meter geradeaus fahren.
Werft einen Blick auf das Schwungradmodell von LEGO Education: Schwungrad.
Aufgabe: Baut ein Schwungrad, das so lange wie möglich rotiert. Das Schwungrad wird nicht mit der Hand, sondern mit einem LEGO Motor in eine Kreisbewegung versetzt. Nach dem Programmstart bringt der Motor das Schwungrad in Drehung und trennt sich dann wenn möglich automatisch von ihm. Verwendet einige Sensoren, um die Zeit bis zum Stillstand des Schwungrads zu messen. Jene Lösung, bei der sich das Schwungrad am längsten dreht, erhält 3 Punkte. Verwendet nur LEGO-Teile. Einschränkung: Spezielle Schwungradteile, wie z.B. 11125c01 - Schwungradplatte, sind nicht erlaubt.
2. Auftrag: Das Abbilden
Das Abbilden einer unbekannten Umgebung ist eine der grundlegenden Aufgaben in der Robotik. Ein Roboter, der in einer Fabrik arbeitet, zum Beispiel um Autos zusammenzubauen, kennt seine Umgebung sehr gut und weiß genau, was zu tun ist. Ein Roboter, der durch eine reale Umgebung navigiert, in der er seine Aufgaben erfüllen soll – zum Beispiel Waren ausliefern, ein beschädigtes Gebäude nach einem Erdbeben erkunden oder die Platzierung eines Möbelstückes in einem neuen Büro vorschlagen soll - muss jedoch seine Umgebung kartografieren.
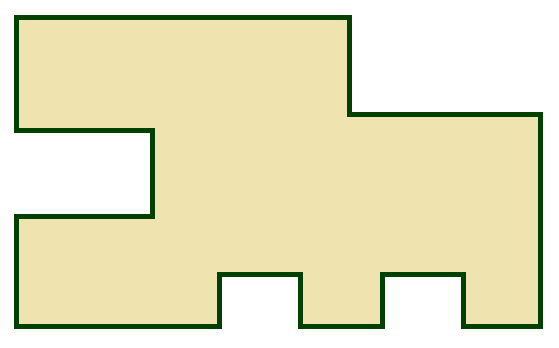
Aufgabe: Ein Roboter befindet sich in einem Raum, in dem alle Wände entweder parallel oder senkrecht zueinander stehen, d.h. es gibt im Raum nur rechtwinklige Ecken. Der Roboter erkundet den Raum und zeigt schließlich die Karte der Raumkonturen von oben gesehen. Die Messungen werden auch in einer Datei gespeichert. Ladet diese Datei auf einen PC hoch und zeigt den Plan auf dem PC-Bildschirm an. Ihr könnt eine beliebige Programmiersprache verwenden - Python, Java, Logo, C#. Die Karte auf dem PC wird von einem Computerprogramm gezeichnet, das einfache Kopieren eines Screenshots vom Roboterbildschirm reicht nicht aus. Mit Ausnahme der Wände ist der Raum völlig leer. Die Abmessungen des Raumes sind mindestens 60x60 cm, idealerweise grösser. Demonstrieren Sie die Funktionalität an verschiedenen Räumen. Beispiel für die Wandkonturen (Draufsicht):